Als Ingenieure der Ecole Polytechnique Fédérale de Lausanne (EPFL) in der Schweiz das Konzept der „Hand“ überdachten, verzichteten sie bewusst auf eine der grundlegendsten Einstellungen: Die Hand muss am Arm befestigt werden. Sie entwickelten eine Roboterhand, die sich vom Roboterarm lösen, wie ein kleines Lebewesen auf der Oberfläche kriechen und sich Objekten aus nahezu jeder Richtung nähern und diese greifen kann, was ein neues Bedienwerkzeug für zukünftige industrielle Inspektions- und Wartungsaufgaben darstellt.
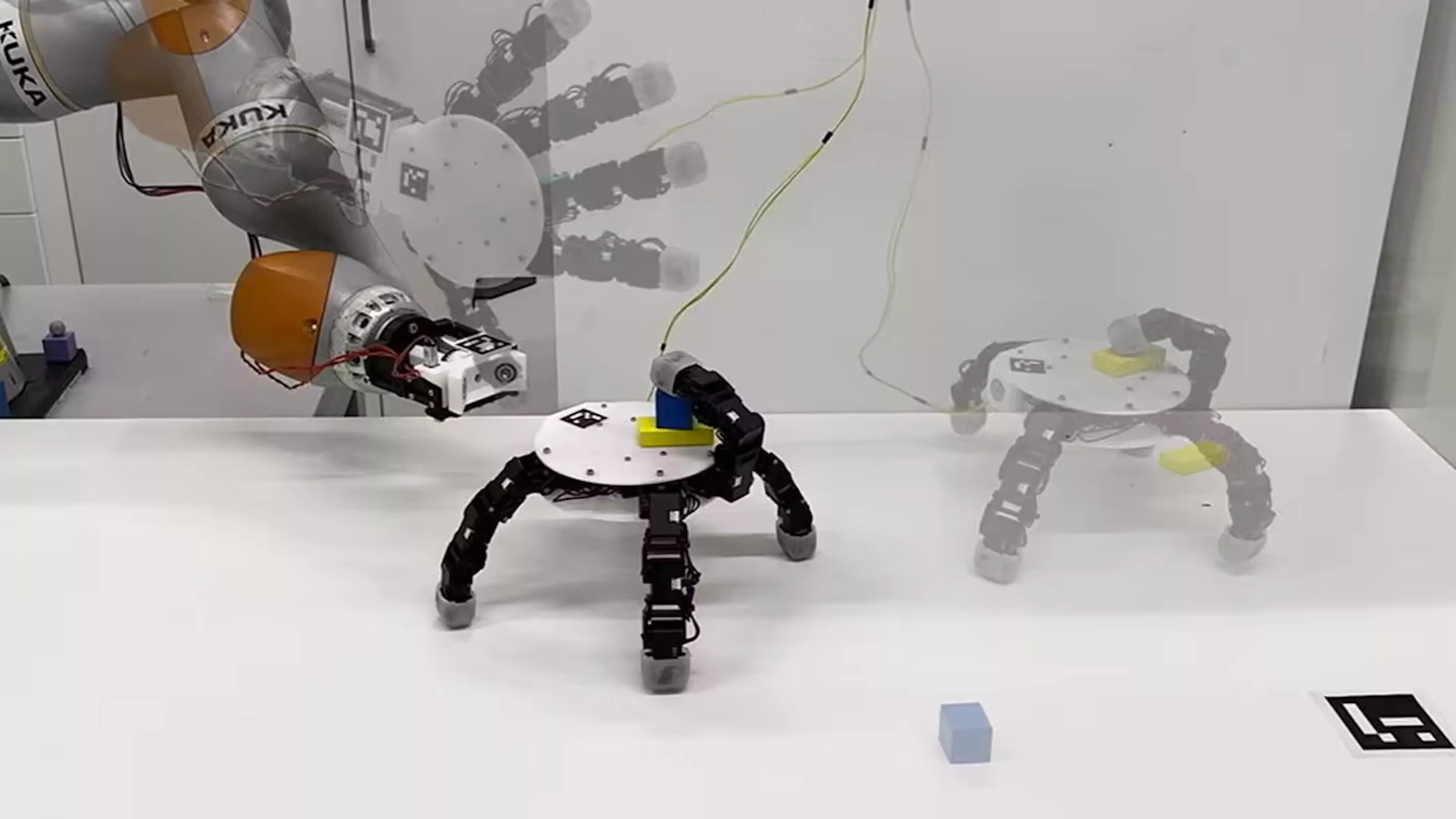
Im Gegensatz zu herkömmlichen Manipulatoren, die am Ende eines Roboterarms befestigt sind, handelt es sich bei diesem neuen Gerät um einen „Dual-Mode“-Manipulator: Er kann als normaler Endeffektor verwendet werden oder er kann sich unabhängig bewegen, nachdem er vom Roboterarm entriegelt wurde. Sobald es losgelöst ist, ist es auf koordinierte Bewegungen zwischen seinen Fingern angewiesen, um zu krabbeln, sich zu drehen und in verschiedene Richtungen neu zu positionieren, um sich aktiv dem Zielobjekt zu nähern. Dieses Design verwischt in gewissem Maße die Grenzen zwischen „Gliedmaßen“ und „mobilen Maschinen“ und wird vom Forschungsteam eher als pragmatische Weiterentwicklung der Roboterform denn als Science-Fiction-Konzept betrachtet.
Das Projekt wird von Gao Xiao geleitet, der an der EPFL geforscht hat und jetzt an der Universität Wuhan ist. Er sagte der Financial Times, dass das Ziel des Teams darin bestehe, die Grenzen dessen zu erweitern, was „Hände“ – ob biologisch oder mechanisch – bei operativen Aufgaben leisten können. Im Gegensatz zu menschlichen Händen, die sich auf einen einzelnen Daumen verlassen, um den übrigen Fingern entgegenzuwirken, kann jeder Finger dieser Roboterhand eine Oppositionsbeziehung mit jedem anderen Finger eingehen. Diese Gegenfingerstruktur verleiht dem System weitaus mehr Flexibilität als die menschliche Hand und ermöglicht es ihm, zwischen verschiedenen Fingerkombinationen zu wechseln, um Ziele auf vielfältige Weise präzise zu manipulieren, beispielsweise durch Kneifen, Klemmen oder Heben.
Was die strukturelle Innovation betrifft, verfügt diese Hand auch über die Fähigkeit, „in beide Richtungen, vorne und hinten zu greifen“, was menschliche Hände nicht haben. Menschliche Finger sind physiologisch gesehen nicht in der Lage, Objekte effektiv von der Handrückenseite aus zu greifen, aber dieses System kann Objekte sowohl in der Vorder- als auch in der Rückwärtsrichtung stabil halten. Dies ermöglicht nicht nur das gleichzeitige Greifen mehrerer Objekte, sondern eröffnet auch Raum für „Multitasking mit der gleichen Hand“ beim Manipulieren von Werkzeugen und Zielen.
In der experimentellen Demonstration erledigte diese Roboterhand eine Reihe von Bedienaufgaben, die normalerweise die Zusammenarbeit zweier menschlicher Hände erfordern, wie etwa das Abschrauben des Flaschenverschlusses beim Fixieren des Flaschenkörpers oder das Aufbringen eines Drehmoments mit einem anderen Werkzeug beim Stabilisieren des Werkstücks. Durch die flexible Planung der gegensätzlichen Kombinationen verschiedener Finger können einige Betriebsmodi in traditionellen Zweihand-Kollaborationsszenarien simuliert oder sogar übertroffen werden.
Gao Xiao betonte, dass der Entwurfsansatz des Teams eher die „funktionale Kontrolle“ als Tarn- oder Überwachungszwecke sei. Forscher gehen davon aus, dass die potenziellsten Anwendungsszenarien an vorderster Front der Industrie liegen: Zustandsprüfung in Rohrleitungen oder Anlagen, Demontage und Montage von Wartungsteilen oder das Auffinden heruntergefallener Werkstücke in engen Räumen. Bei diesen Anwendungen können herkömmliche vollständige Roboterarme oder menschliche Bediener häufig nicht in die Baustelle vordringen, während kleine, unabhängig mobile „Kriechhände“ schwer zugängliche Stellen erreichen und bedienen können.
Das Forschungsteam stellt sich vor, dass zukünftige Robotersysteme mobile Plattformen mit solchen abnehmbaren Roboterhänden kombinieren könnten. Die mobile Plattform ist für die Inspektion und den Zugriff auf Geräte an komplexen Standorten verantwortlich, während sich die Roboterhand bei Bedarf von der Plattform oder dem Roboterarm löst und tief in enge Räume vordringt, um Aufgaben wie das Entfernen von Schmutz, das Betätigen von Ventilen oder das Greifen von Geräten zu erledigen. Von dieser Struktur der Arbeitsteilung und Zusammenarbeit wird erwartet, dass sie die Anpassungsfähigkeit und Aufgabenerledigungsrate industrieller Automatisierungssysteme in komplexen Umgebungen verbessert.
Diese Arbeit hat auch die Aufmerksamkeit der Robotik-Community auf sich gezogen. Digby Chappell, außerordentlicher Professor am Institute of Robotics der Universität Oxford, kommentierte, dass diese Roboterhand „interessant und provokativ“ sei und aufschlussreiche Bedeutung in Bereichen wie der industriellen Automatisierung und der Prothetikforschung habe. Er wies darauf hin, dass die Kriechgeschwindigkeit des Prototyps zwar derzeit nicht sehr hoch sei, seine Fähigkeit, Synergien zwischen „Bewegung und Greifen“ zu erzielen, jedoch bereits die mögliche Form von „Roboterhänden“ neu definiert.
Derzeit befindet sich diese „Krabbelhand“ noch im Labor-Prototypenstadium. Es hat sich jedoch eindeutig ein völlig anderer Weg als die Nachahmung der menschlichen Anatomie gezeigt: Der nächste Schritt der Robotik beschränkt sich möglicherweise nicht mehr darauf, „wie Menschen zu sein“, sondern wird sich in eine anpassungsfähigere, vielseitigere und modularere Richtung entwickeln, die sich an industriellen und praktischen Anforderungen orientiert.