Ein Forschungsteam der Universität Würzburg in Deutschland hat kürzlich einen photonengetriebenen Nanoroboter entwickelt, der etwa ein Fünfzigstel des Durchmessers eines menschlichen Haares hat. Es kann Bakterien in einer flüssigen mikroskopischen Umgebung genau verfolgen, einfangen, transportieren und freisetzen und bietet so einen neuen technologischen Weg für den Menschen, die mikrobielle Welt direkt zu kontrollieren.
Berichte zeigen, dass diese Art von Mikrorobotern auf Operationen im Kleinstmaßstab abzielt, bei denen es mit herkömmlichen Mitteln kaum möglich ist, effektiv einzugreifen. Für biologische Materialien wie einzelne Zellen und Bakterien in einer flüssigen Umgebung war die Erzielung einer hochpräzisen Steuerung schon immer ein großes Problem in der wissenschaftlichen Forschung, und dieses neue Ergebnis zeigt, dass Aufgaben wie das Sammeln und Umsiedeln von Bakterien jetzt machbar sind.
Das Forschungsteam wurde von Bert Hecht, Professor an der Julius-Maximilians-Universität Würzburg in Deutschland, geleitet. Die vom Team vorgeschlagene Kernlösung besteht darin, den schwachen Rückstoß zu nutzen, der entsteht, wenn ein einzelnes Photon emittiert wird, um die Bewegung eines Geräts im Mikrometerbereich anzutreiben, das als „Mikrodrohne“ bezeichnet wird.
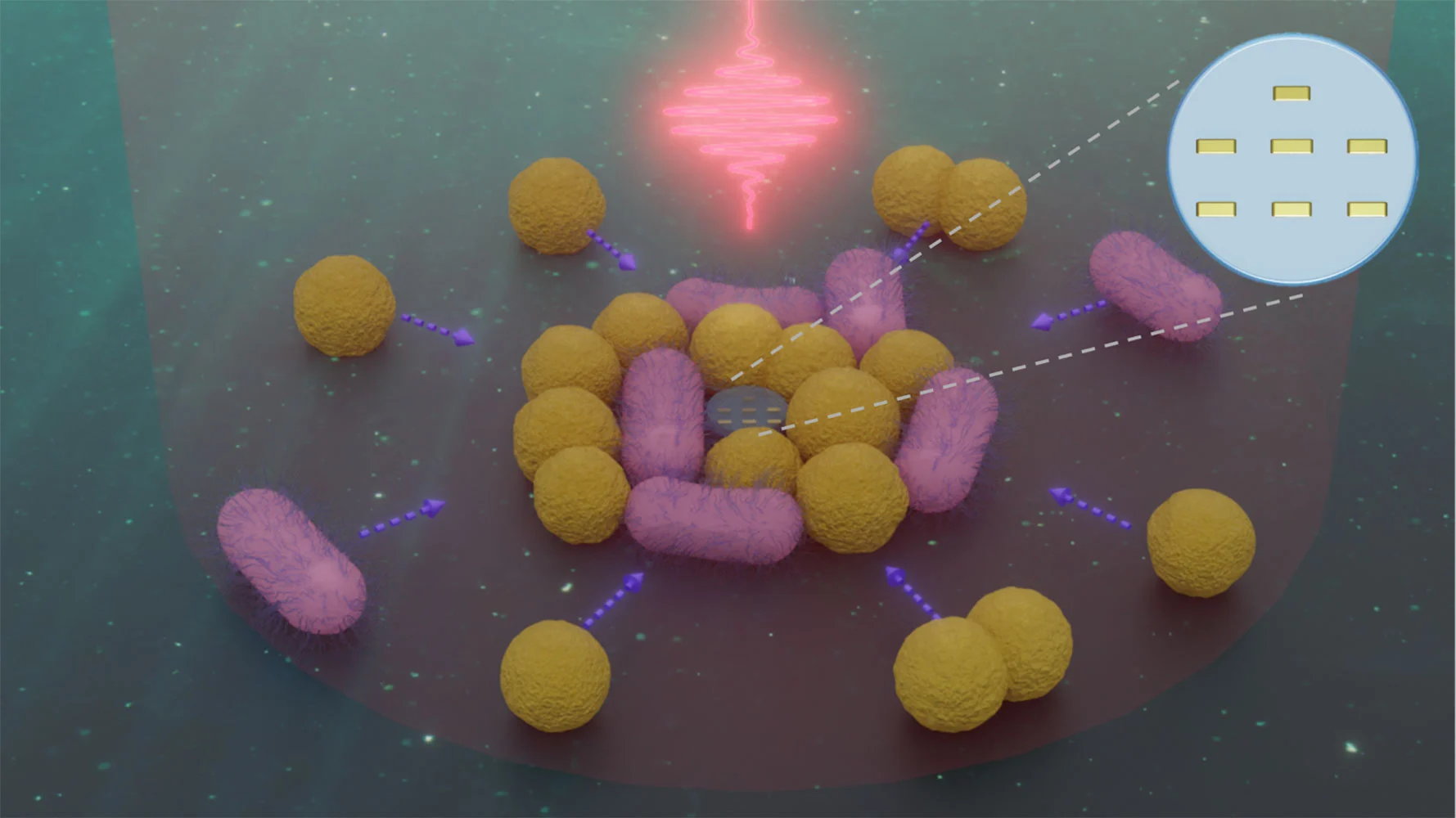
Berichten zufolge können in diesen Geräten bis zu vier plasmonische Nanoantennen integriert werden. Sie absorbieren zunächst Licht mit bestimmten Eigenschaften und emittieren dann Photonen gezielt wieder; Jeder Schuss erzeugt eine äußerst geringe Rückstoßkraft, die im Prinzip der Rückstoßkraft einer Kugel nach dem Austritt aus dem Lauf ähnelt. Da die Masse des Mikroroboters selbst extrem gering ist, reicht diese Kraft, auch wenn sie sehr schwach ist, immer noch aus, um eine hohe Geschwindigkeit und schnelle Beschleunigung zu erreichen.
In der neuesten Forschung haben Forscher die Größe dieser Art von lichtbetriebenen Robotern weiter auf weniger als 1 Mikrometer reduziert und ihre Steuerungsmethode vereinfacht, aber dennoch den auf Photonenrückstoß basierenden Antriebsmechanismus beibehalten.
Das Team machte sich die Tatsache zunutze, dass sich die Antennendrähte im Inneren des Roboters auf natürliche Weise an der Polarisationsrichtung des einfallenden Lichts ausrichten. Durch die Anpassung des Polarisationszustands des Lichts können Forscher die Richtung des Roboters steuern, und sein Vorwärtsimpuls kommt immer noch vom Photonenrückstoß, wodurch seine Steuerungsmethode näher an die „Lenkung plus Vortrieb“-Methode des makroskopischen Transports herankommt.
Jin Qin, der erste experimentelle Wissenschaftler auf dem Papier, sagte, dass das Team im Wesentlichen einen durch Licht angetriebenen Nanoroboter gebaut habe, der Bakterien einschließen und sammeln könne. Aufgrund der vereinfachten Struktur wurde die Größe des Roboters auf einen Maßstab reduziert, bei dem er direkt in die mikrobiellen Aktivitäten eingreifen kann, er gleicht gewissermaßen einem „mikroskopischen Reinigungsgerät“.
Die Forscher sagten, dass diese Art von Nanoroboter über eine hohe Manövrierfähigkeit verfügt und schnell 90-Grad-Drehungen durchführen kann, sodass er systematische und effiziente Scans in einem großen Probenbereich durchführen kann. Gleichzeitig kann es eine beträchtliche Anzahl von Bakterien selektiv einfangen, transportieren und freisetzen.
Das bedeutet, dass von diesem Gerätetyp in einer kontrollierten Versuchsumgebung erwartet wird, dass er einen „Reinigungs“-Vorgang in der Mikroumgebung durchführt – indem er Bakterien in konzentrierter Weise sammelt und sie an einen vorbestimmten Ort bewegt.
Bert Hecht wies darauf hin, dass diese Leistung anschaulich zeige, dass Licht nicht nur zur Beobachtung der mikroskopischen Welt, sondern auch zur aktiven Gestaltung der mikroskopischen Welt genutzt werden könne. Obwohl das Konzept der „Mikroroboter-Reiniger“ futuristisch klingt, wurden die relevanten physikalischen Prinzipien inzwischen experimentell bestätigt.
Selbst beim Tragen größerer Bakterienansammlungen behalten die Nanoroboter ihre volle Beweglichkeit, allerdings ist ihre Bewegungsgeschwindigkeit leicht reduziert. Das Forschungsteam ist davon überzeugt, dass diese Stabilität das Anwendungspotenzial in Bereichen wie der Mikrobiologie, der biomedizinischen Forschung und der präzisen Kontrolle im Kleinstmaßstab weiter unterstreicht.
Das entsprechende Forschungspapier trägt den Titel „A nanoscale robotic cleaning“, wurde von Jin Qin, Carsten Büchner, Wu Xiaofei und Bert Hecht mitunterzeichnet und wurde am 27. März 2026 veröffentlicht.