Forscher der Harvard University haben kürzlich eine neue Reihe von 3D-Drucktechnologien entwickelt, mit denen bionische Muskelfasern mit „programmierten Bewegungsfähigkeiten“ direkt gedruckt werden können. Dies ist ein wichtiger Schritt für Roboter, um flexible Bewegungen näher an den Menschen heranzuführen. Die Branche geht davon aus, dass dieser Erfolg voraussichtlich die Art und Weise verändern wird, wie Softroboter, medizinische Geräte und intelligente Strukturen entworfen werden.
Die Ingenieursgemeinschaft hat schon lange Strukturen geschaffen, die Knochen, Nerven und sensorischen Systemen für Roboter ähneln, doch Muskeln waren schon immer am schwierigsten zu simulieren. Herkömmliche Roboter basieren hauptsächlich auf Motoren sowie hydraulischen und pneumatischen Systemantrieben. Obwohl ihre Bewegungen präzise und kraftvoll sind, weisen sie oft starre Strukturen, komplexe Mechanismen und unelegante Körperhaltungen auf. Es ist schwierig, sanfte, weiche und fein kontrollierte Bewegungen ähnlich dem menschlichen Körper zu erreichen. Zuvor haben Forscher versucht, pneumatische künstliche Muskeln, wärmeempfindliche Legierungen, elektrisch reagierende Polymere, magnetische Materialien und Kabelsysteme zu verwenden, die menschliche Sehnen imitieren, um einen Softwareantrieb zu erreichen. Sie erfordern jedoch oft sperrige externe Kompressoren, Hochspannungsgeräte oder komplexe Mechanismen, was es schwierig macht, gleichzeitig geringes Gewicht, Reaktionsfähigkeit und eine komplexe Fertigung zu erreichen.
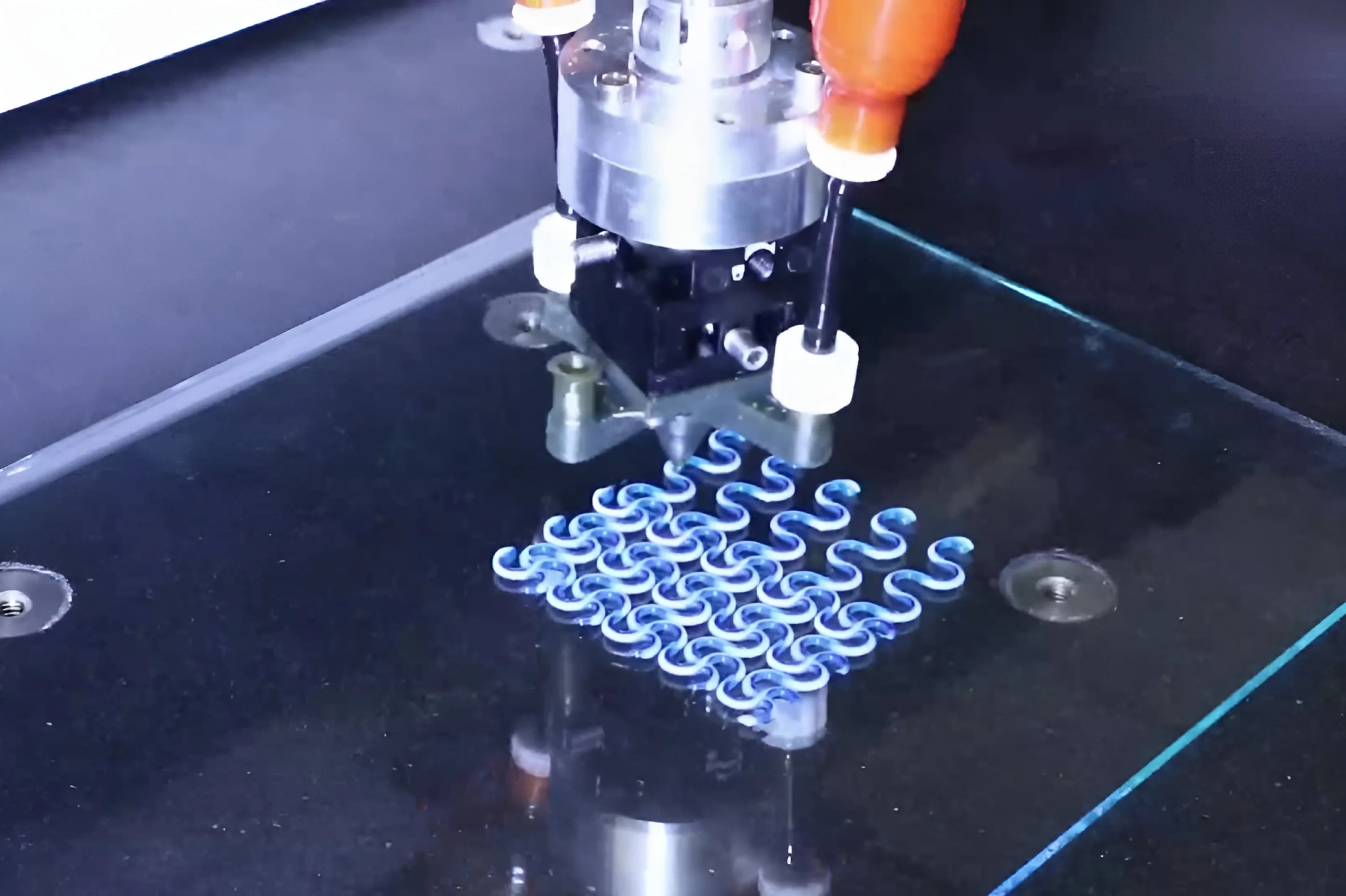
Die vom Team der Harvard John A. Paulson School of Engineering and Applied Sciences vorgeschlagene neue Methode versucht, Bewegungslogik auf der Materialebene „einzubauen“. Forscher nutzten die 3D-Drucktechnologie, um zwei Arten weicher Materialien nebeneinander präzise in schlanke bionische „Muskel“-Fasern zu drucken: Eines ist ein „aktives Flüssigkristall-Elastomermaterial“, das seine Form ändert, wenn es Hitze ausgesetzt wird, und das andere ist ein „passives Elastomer“-Material, das Verformungen widersteht. Durch Drehen der Düse während des Druckvorgangs schrieb das Team helikale molekulare Orientierungsmuster im mikroskopischen Maßstab und steuerte so das Reaktionsverhalten in verschiedenen Bereichen genau.
Unter Erwärmungsbedingungen schrumpft das „aktive“ Flüssigkristall-Elastomer entlang einer bestimmten Richtung der molekularen Anordnung, während das eng mit ihm verbundene „passive“ Material dieser Schrumpfung einen Widerstand entgegensetzt. Dadurch erfährt die gesamte Faser komplexe Verformungen wie Biegen, Verdrehen, Kräuseln und sogar Aufrollen. Durch Ändern der Anordnung der beiden Materialien und der Rotationsparameter der Düse können Forscher unterschiedliche Verformungsbahnen innerhalb einer einzelnen Faser voreinstellen, sodass sie sich beim Erhitzen auf eine vorgegebene Weise dehnen, schrumpfen, spiralförmig wickeln oder entfalten kann, ohne dass zusätzliche Zahnräder, starre Verbindungen oder Nachmontagemechanismen erforderlich sind.
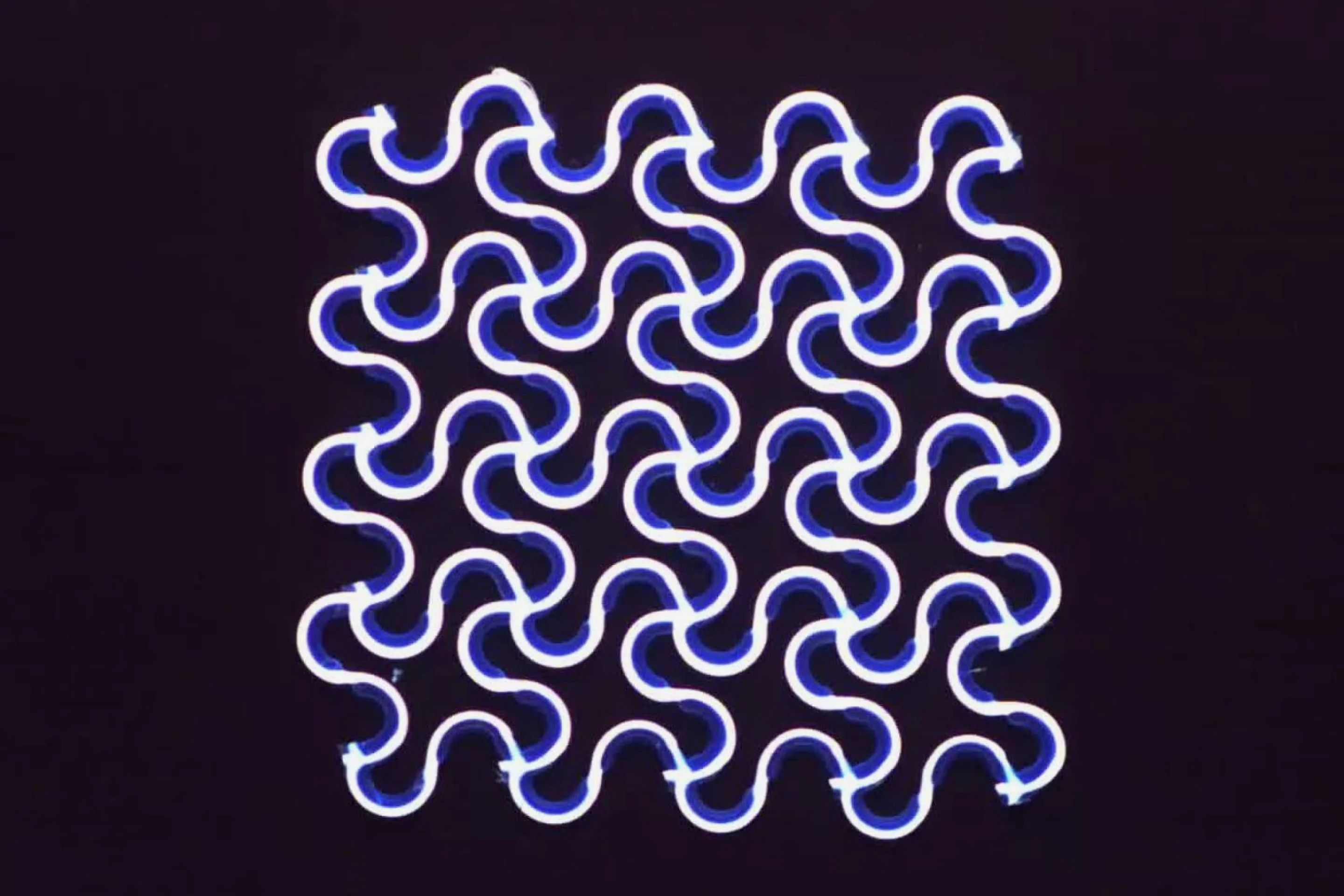
Bei der experimentellen Demonstration druckte das Team verschiedene weiche Gitterstrukturen und wellenförmige Fasern und beobachtete deren einzigartige Verformungsmethoden durch Erhitzen. Einige Strukturen dehnen sich nach dem Erhitzen deutlich im Volumen aus, während andere insgesamt schrumpfen; Das flache Gitter kann sich nach dem Erhitzen zu einer kuppelartig gekrümmten Oberfläche ausbauchen und weist erhebliche dreidimensionale Verformungsfähigkeiten auf. Forscher haben diese Art von Material auch verwendet, um einen weichen Greifer zu entwickeln, der sich bei Annäherung an ein Objekt senken und umwickeln, dann festziehen kann, um den Griff zu vervollständigen, und sich dann aufgrund von Temperaturänderungen lockern und loslassen kann, wodurch ein flexibler Greifvorgang ähnlich dem einer menschlichen Hand erreicht wird.
Nach Angaben des Forschungsteams wird erwartet, dass diese Technologie in Zukunft in Bereichen wie adaptiven Softmanipulatoren, aktiven Filter- und Regulierungsstrukturen, biomedizinischen Geräten, temperaturempfindlichen Komponenten und verformbaren Robotersystemen eingesetzt wird. Im Vergleich zu herkömmlichen Antriebsmethoden ist diese Methode in hohem Maße mit dem 3D-Druckverfahren kompatibel und ermöglicht die Herstellung komplexer und hochgradig individueller interner Strukturen, wodurch geometrische und Bewegungskombinationen möglich werden, die mit herkömmlichen Aktuatoren bisher nur schwer zu erreichen waren.
Allerdings weist das aktuelle System noch erhebliche Einschränkungen auf. Derzeit beruht die Faseraktivierung hauptsächlich auf thermischer Stimulation, was es schwierig macht, hinsichtlich Reaktionsgeschwindigkeit und Energieeffizienz mit ausgereiften Motorsystemen mitzuhalten, und die Gesamtleistungsfähigkeit reicht nicht aus, um herkömmliche Roboteraktuatoren in Hochleistungsszenarien vollständig zu ersetzen. Die Forscher sagten, dass sich die relevanten Materialien und Strukturdesigns noch im experimentellen Stadium befinden und hinsichtlich Stimulationsmethoden, Haltbarkeit, Energienutzungseffizienz usw. kontinuierlich optimiert werden müssen, bevor sie wirklich in technische und kommerzielle Anwendungen übergehen können.
Diese Forschung wurde von einem Team der Harvard University durchgeführt und detaillierte Ergebnisse wurden von der School of Engineering and Applied Sciences der Schule veröffentlicht.