Ein Team der University of Florida gab kürzlich bekannt, dass es ein neues Unterwasserkommunikationssystem namens BlueME entwickelt hat, das voraussichtlich die Art und Weise revolutionieren wird, wie autonome Unterwasserroboter miteinander und mit Menschen an der Oberfläche kommunizieren. Die Forscher sagten, dass diese Technologie aus ihrer jahrelangen Forschung zu drahtlosen implantierbaren Geräten im Körper hervorgegangen sei. Die Idee besteht darin, die Erfahrung der elektromagnetischen Ausbreitung in der „leichten Salzwasserumgebung“ des menschlichen Körpers auf ein ähnliches Medium wie den Ozean zu übertragen.
Derzeit haben herkömmliche Unterwasserkommunikationsmethoden ihre eigenen Grenzen. Unter Wasser sind Funkwellen von geringem Nutzen, da normale Funksignale im Salzwasser oft über eine Entfernung von nur wenigen Fuß um etwa 1 bis 10 Dezibel pro Meter gedämpft werden. Obwohl die akustische Kommunikation eine Übertragung über größere Entfernungen ermöglichen kann, wird sie durch Faktoren wie Doppler-Frequenzverschiebung und Mehrwegestörungen beeinträchtigt und kann auch zu Lärmschäden bei Meereslebewesen führen. Optische Systeme verfügen unter idealen Bedingungen über eine extrem hohe Bandbreite, erfordern jedoch eine direkte Sichtverbindung. Sobald das Wasser trübe ist oder das optische Fenster aufgrund biologischer Adhäsion beschädigt ist, wird die Leistung stark reduziert. Insgesamt können die meisten Unterwasserroboter jetzt entweder nur noch sehr kurze Status-„Heartbeat-Pakete“ senden oder sie müssen regelmäßig auftauchen, um Missionsdaten hochzuladen, was ihre Echtzeit-Autonomiefähigkeiten stark einschränkt.
Das BlueME-System soll diese Engpässe beheben. Das System verwendet eine magnetoelektrische (ME) Antenne, um autonomen Unterwasserfahrzeugen (AUVs) eine Datenkommunikation bis zu einer Entfernung von 730 Metern zu ermöglichen und dabei nur etwa 10 Watt Strom zu verbrauchen, was weniger ist als eine Haushalts-LED-Glühbirne. Nach Angaben des Forschungsteams kann BlueME in einer Süßwasserumgebung eine stabile Kommunikation in einer Entfernung von 200 Metern mit nur 1 Watt Leistung aufrechterhalten, und in einer Salzwasserumgebung kann es eine Signalerkennung auf 730 Metern mit weniger als 10 Watt erreichen und wird nicht durch Wassertrübung, Hindernisse oder Mehrwegestörungen beeinträchtigt.
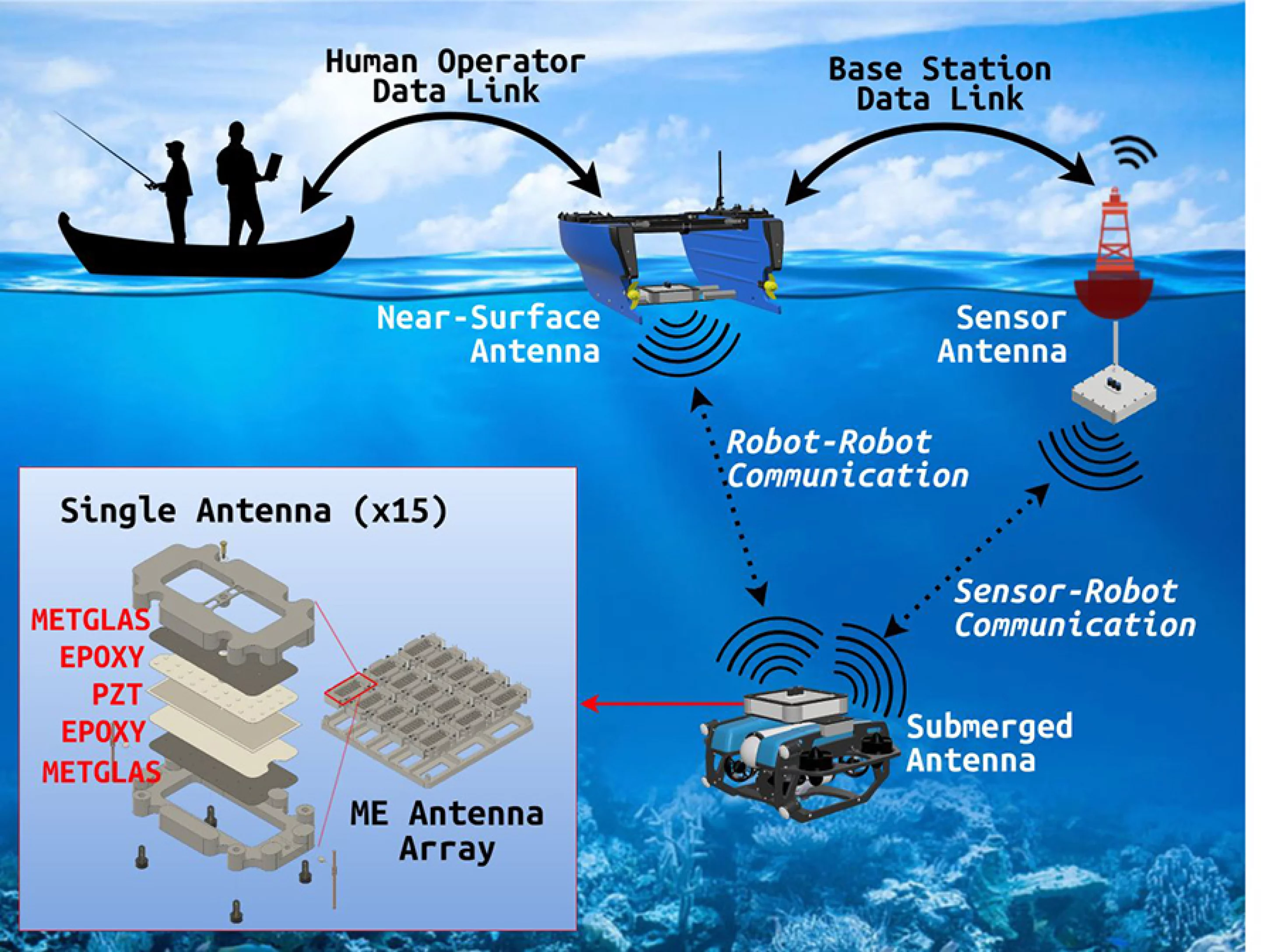
Die Kerninnovation dieses Systems besteht darin, magnetostriktive Materialien mit piezoelektrischen Keramikmaterialien zu koppeln, um eine magnetoelektrische Antenne zu bilden. Insbesondere verformt das äußere Magnetfeld die magnetostriktive Schicht namens Metglas, und diese mechanische Verformung veranlasst die benachbarte piezoelektrische PZT-Schicht, Spannung zu erzeugen; Der umgekehrte Vorgang kann die Signalaussendung abschließen. Dank dieses elektromechanischen Kopplungsdesigns kann die Antenne im sehr niedrigen Frequenzband von etwa 35 bis 36 kHz betrieben werden und ist dabei viel kleiner als herkömmliche elektrische Antennen mit der gleichen Frequenz.
Das komplette BlueME-System besteht aus 15 dieser Antennen in einem 3×5-Array, untergebracht in einem ölkompensierten wasserdichten Gehäuse, um den enormen hydrostatischen Druck auszugleichen, der in Tiefwasserumgebungen herrscht. Interessanterweise stellten die Forscher fest, dass sich die Leistung dieser magnetoelektrischen Antenne nach dem Eintritt ins Wasser verbesserte: Bei 36 kHz betrug die Signalwellenlänge in der Luft etwa 8.327 Meter, in Süßwasser wurde sie jedoch auf etwa 170 Meter komprimiert, was die Strahlungseffizienz der kleinen Antenne erheblich verbesserte. Durch die gemeinsame Übertragung mehrerer Antennen wird die abgestrahlte Leistung im Vergleich zu einer einzelnen Antenne um etwa das 225-fache verstärkt. In Verbindung mit dem passenden Empfangsarray kann der theoretische Verbindungsgewinn etwa 119 Dezibel erreichen.
Das Projekt wird gemeinsam von Adam Khalifa und Md Jahidul Islam geleitet und die Forschungsergebnisse wurden von IEEE Transactions on Ocean Engineering akzeptiert. Khalifa, der sich seit langem mit der Entwicklung mikrodrahtloser implantierbarer Geräte beschäftigt, erinnerte sich, dass ihm eines Tages plötzlich die Ähnlichkeiten in den physikalischen Eigenschaften des menschlichen Körpers und des Ozeans klar wurden: „Unsere Körper bestehen im Wesentlichen aus leichtem Salzwasser, was uns dazu brachte, ganz anders über die Kommunikation im Ozean nachzudenken.“
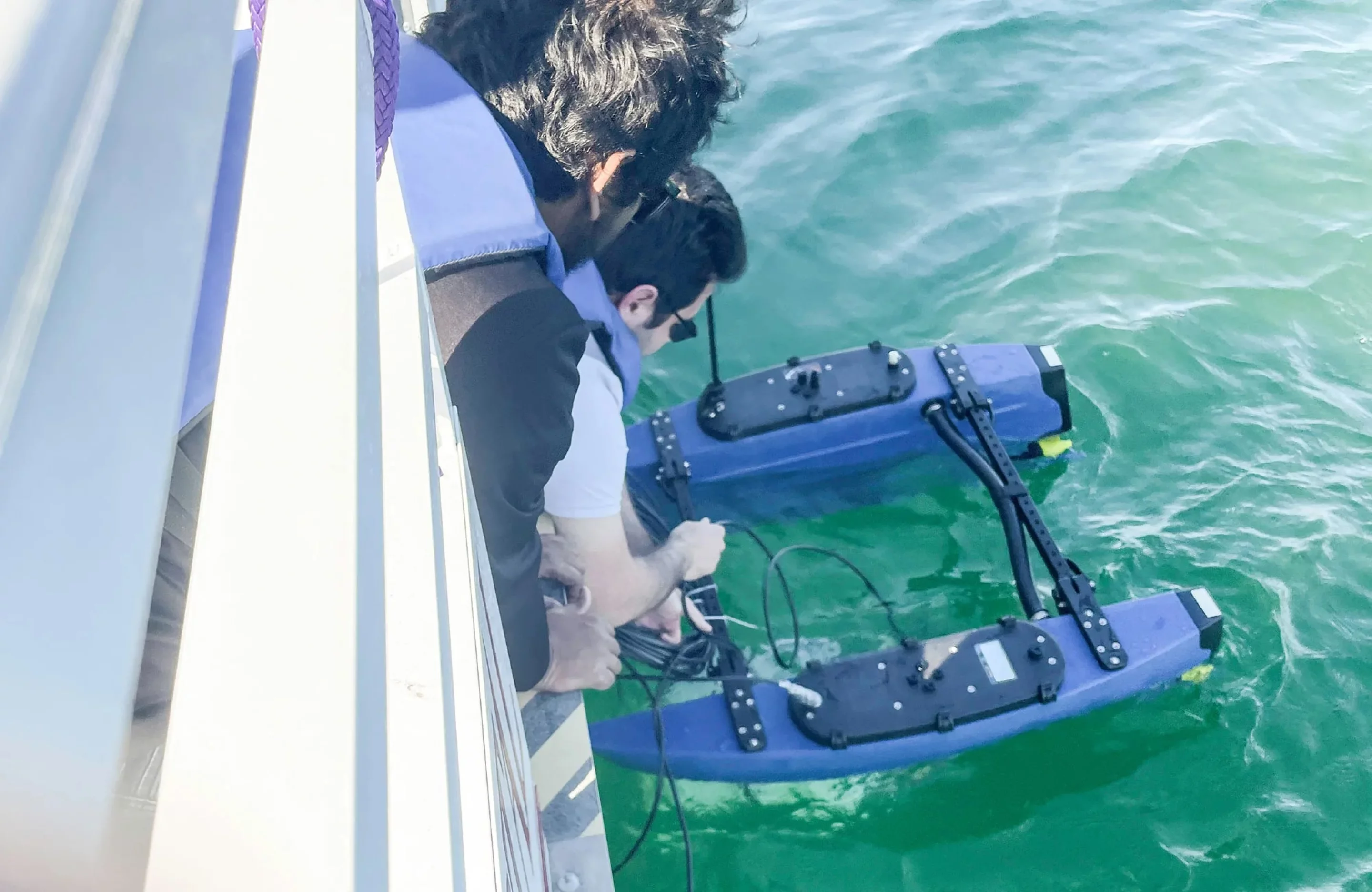
Beim Freiwassertest führte das Team Feldversuche am Warburg Lake (Süßwasser) in Gainesville, Florida, und an der Golfküste Floridas (Salzwasser) durch, um die Leistung des Systems unter verschiedenen Wasserbedingungen zu überprüfen. Experimente zeigen, dass BlueME unabhängig von der Trübung des Wasserkörpers oder dem Vorhandensein von Hindernissen oder Mehrwegreflexionen eine stabile Verbindung aufrechterhalten kann, was für Unterwassereinsätze in komplexen Offshore-Umgebungen von praktischer Bedeutung ist.
Was die Datenraten angeht, erreicht BlueME derzeit Übertragungen von etwa 1 Kb/s bis 100 Kb/s und liegt damit deutlich unter den Gigabit-Geschwindigkeiten, die optische Systeme unter idealen Bedingungen erreichen können. Das Forschungsteam betonte jedoch, dass das Designziel des Systems von Anfang an nicht darin bestand, eine extrem hohe Bandbreite anzustreben, sondern einen geringen Stromverbrauch, große Entfernungen, Stabilität und eine bidirektionale Verbindung mit geringeren Auswirkungen auf die Umwelt zu erreichen. „Es ist vorstellbar, dass der Roboter Ihnen alle 10 Minuten den Fortschritt der Aufgabe meldet und der Bediener die Aufgabe auf dieser Grundlage in Echtzeit beurteilen und anpassen kann, was entscheidend genug ist, um die Flexibilität von Unterwassereinsätzen zu verbessern.“ Der Islam sagte.
Der Autor des Papiers wies darauf hin, dass dies das erste Mal sei, dass eine magnetoelektrische Antenne auf praktischem Niveau in einer Außenumgebung eingesetzt werde, und dass es sich außerdem um eines der bisher größten magnetoelektrischen VLF/LF-Antennenarrays handele. Das Team hat nun einen vorläufigen Patentantrag eingereicht und sucht nach weiteren Mitteln, um die Hardware zu verbessern und zusätzliche Reiseversuche auf einer vollständigen autonomen Unterwasserfahrzeugplattform durchzuführen. Zu den erwarteten zukünftigen Anwendungen gehören Schlüsselszenarien wie die kollaborative Formationsnavigation, die Kartierung des Meeresbodengeländes und die Echtzeitpositionierung.
„Wir haben die aktuellen Ergebnisse mit sehr begrenzten Anfangsressourcen erreicht.“ Khalifa betonte, dass das Potenzial dieser Plattform die derzeit nachgewiesenen Fähigkeiten bei weitem übertreffen wird, wenn in Zukunft spezielle technische Investitionen getätigt und ein Einsatz in größerem Maßstab erreicht werden können. Islam beschrieb die aktuelle Phase als „eine sehr frühe Phase eines Produkts mit großem Potenzial“, was darauf hindeutet, dass BlueME immer noch über große Fantasie im Anwendungsbereich der Unterwasserkommunikation und sogar Meeresroboter verfügt.