Ein Forschungsteam an der West Virginia University in den Vereinigten Staaten hat kürzlich eine weiche, aber leistungsstarke weiche Roboterhand entwickelt, die nicht nur empfindliches Obst und Gemüse wie Erdbeeren sanft pflücken kann, sondern auch den Reifegrad durch Berührung und Sicht während des Pflückvorgangs umfassend beurteilen kann, was voraussichtlich die Arbeitskosten und die Abfallquote beim Pflückvorgang erheblich senken wird.
Berichten zufolge wird die Landwirtschaft zu einer der Branchen, die zunehmend von der Robotertechnologie betroffen sind. Landwirte in vielen Regionen der Welt sind mit dem doppelten Druck von Arbeitskräftemangel und steigenden Arbeitskosten konfrontiert. Bei manchen Kulturen betragen die Kosten für die manuelle Ernte sogar fast die Hälfte der gesamten Produktionskosten. Bei Obst und Gemüse mit extrem kurzen Pflückfenstern und leichten Beschädigungen wie Erdbeeren, Himbeeren und Avocados ist es oft schwierig, Effizienz und Verlust mit der traditionellen manuellen oder starren mechanischen Pflückung in Einklang zu bringen. Dadurch können Landwirte bis zu einem Viertel ihres Ertrags verlieren.
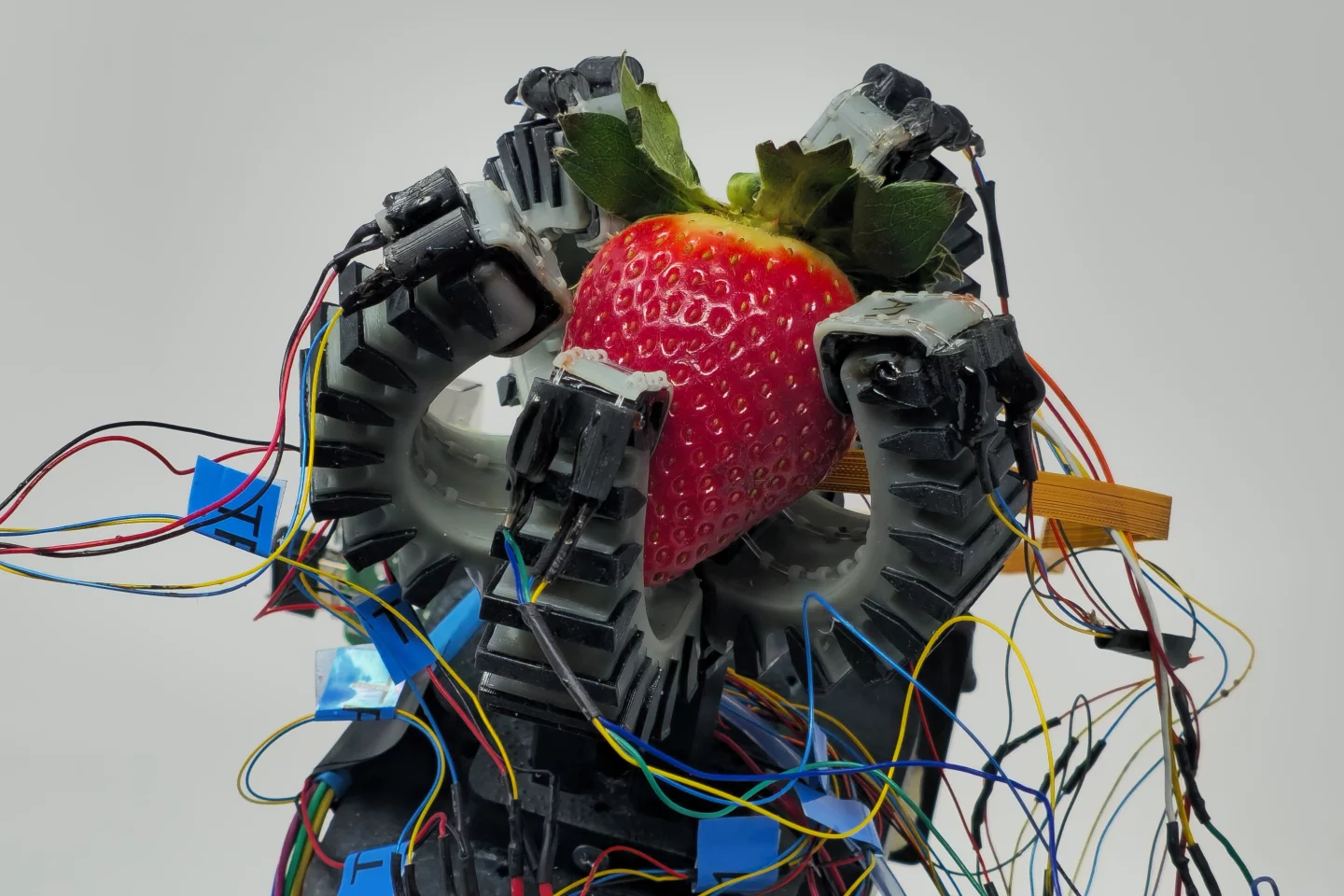
Das „Robiotics Lab“-Team der West Virginia University arbeitet an der Entwicklung von Robotern, die die Bewegung von Tieren nachahmen. Die diesmal gestartete weiche Roboterhand ist nicht die „mechanische Klaue“ aus Metall, an die die Leute denken. Stattdessen lässt es sich von der Anatomie des Seesterns inspirieren und verwendet Silikon- und Polyurethanmaterialien, um weiche Finger herzustellen. Gleichzeitig behält die Gesamtform immer noch eine Fünf-Finger-Anordnung bei, die der einer menschlichen Hand ähnelt, so dass Früchte natürlicher aufgenommen und gehalten werden können.
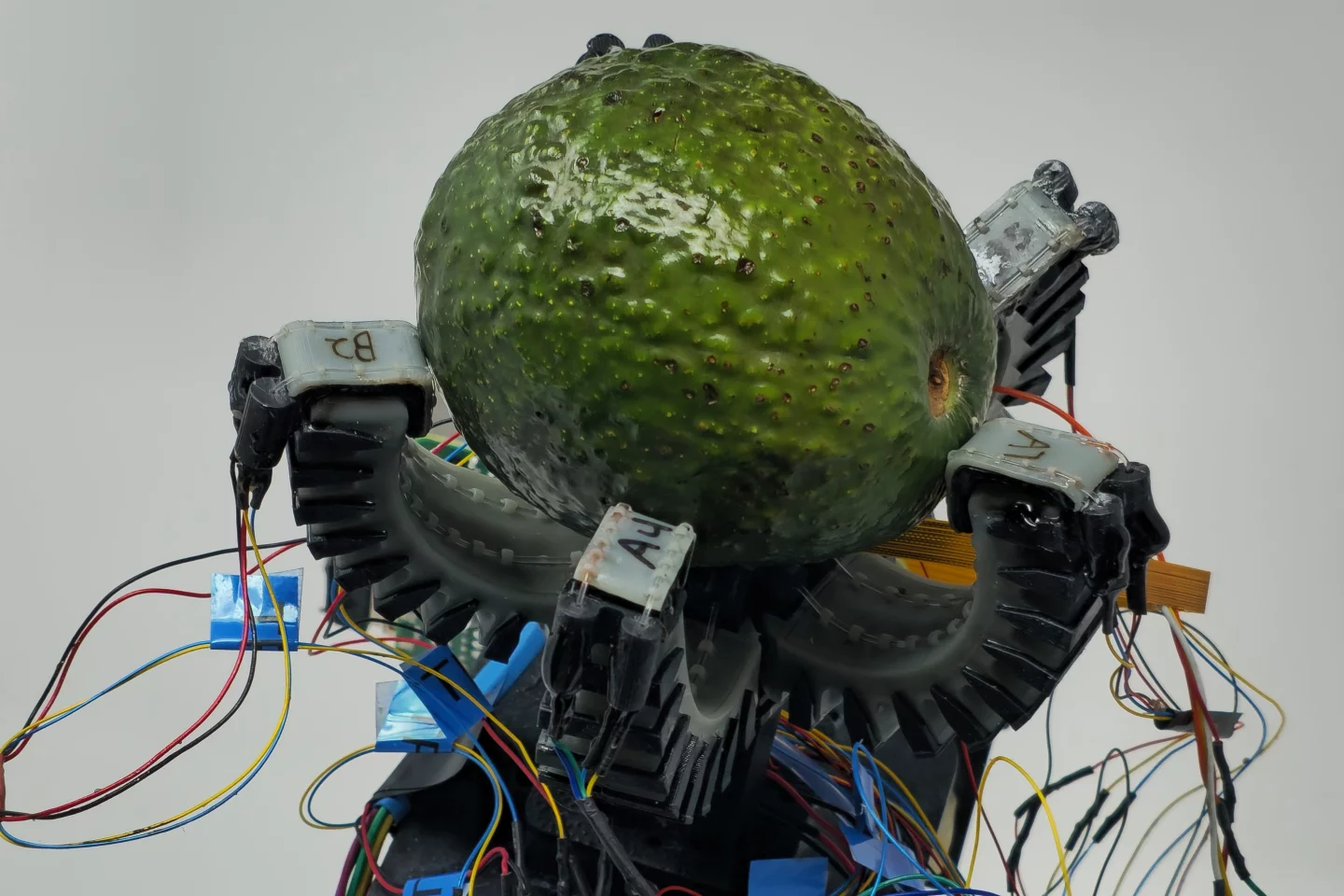
Was die Wahrnehmungsfähigkeit betrifft, ist diese neue Roboterhand mit einer Miniaturkamera zur visuellen Beurteilung des Aussehens von Früchten ausgestattet. Diese Funktion wurde auf einige Agrarroboter angewendet. Die Forscher wiesen jedoch darauf hin, dass es nicht ausreicht, sich allein auf das Aussehen zu verlassen, um den Reifegrad genau zu beurteilen. Am Beispiel von Avocados muss ihre Reife oft durch leichtes Kneifen erspürt werden. Wie man den Roboter dieses „menschliche intuitive“ Urteil erlernen lässt, ist eine der Hauptschwierigkeiten dieser Forschung.
Um dieses Problem zu lösen, hat das Forscherteam spezielle taktile Sensoren in die weichen Finger eingebaut, sodass der Roboter beim sanften Drücken der Frucht physikalische Informationen über die Härte und Elastizität erhalten kann, ohne die Frucht zu zerdrücken. Diese Sensoren können auch die Haltekraft in Echtzeit überwachen. Wenn das System feststellt, dass der aktuelle Griff nicht fest genug ist, passt der Roboter die Kraft automatisch an, um zu verhindern, dass die Frucht verrutscht oder auf den Boden fällt.
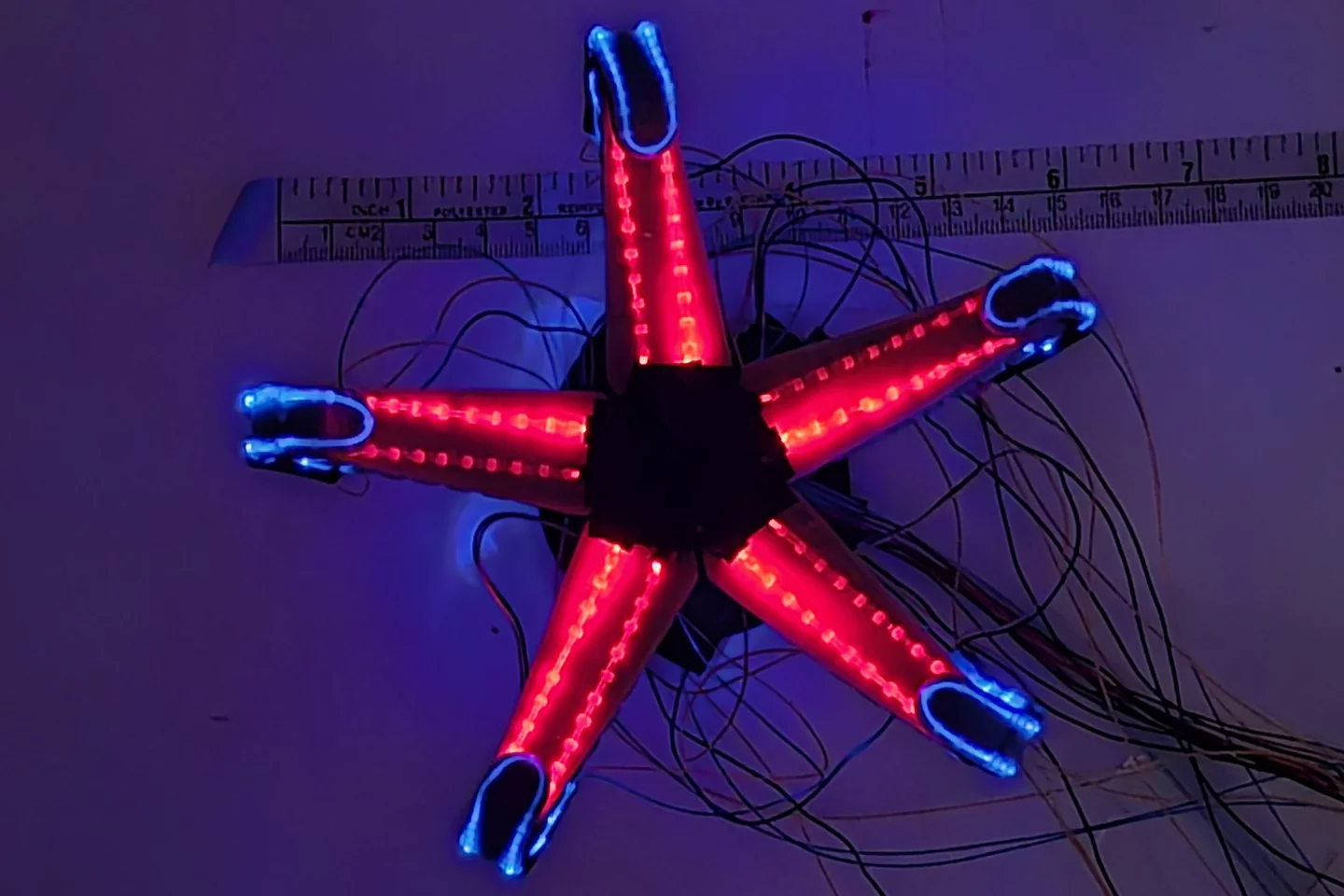
Während der Testphase zeigte die Roboterhand eine hohe Wahrnehmungs- und Kontrollgenauigkeit und der Sensor konnte die Form der gegriffenen Frucht mit nahezu 100-prozentiger Genauigkeit vorhersagen. Der aktuelle Prototyp wiegt weniger als 65 Gramm, benötigt weniger als zwei Sekunden zum einmaligen Öffnen und Schließen und kann ein maximales Objekt von etwa 1 Kilogramm heben. Damit sind die Grundvoraussetzungen für geringes Gewicht und Reaktionsgeschwindigkeit für die tatsächliche Integration in landwirtschaftliche Maschinen geschaffen.
Projektleiter Anand Mishra, Assistenzprofessor in der Abteilung für Maschinenbau, Werkstoffe und Luft- und Raumfahrttechnik, sagte, das Team plane, diese Software-Greiftechnologie in den nächsten zwei bis vier Jahren auf den Weltmarkt zu bringen, und arbeite an der Entwicklung eines skalierbareren Greifgeräts, um den Anforderungen eines groß angelegten Einsatzes vor Ort gerecht zu werden. Die Forscher sind auch optimistisch, was die Anwendungsaussichten dieser Technologie in einem breiteren Spektrum von Szenarien angeht, darunter das Ergreifen seltsamer Objekte bei Weltraummissionen, die Erforschung von Unterwasserumgebungen und die sichere Handhabung empfindlicher Gewebe und Organe im Bereich der medizinischen Versorgung.

Relevante Forschungsarbeiten wurden in der Fachzeitschrift „Nature Communications“ veröffentlicht und zeigen, dass Greiflösungen für Roboter, die Softwarestrukturen, optische Fasersensorik und Bildverarbeitungssysteme kombinieren, zu einem wichtigen technischen Weg für Szenarien mit hohem Verlust und hoher Präzision werden. Die Forscher wiesen darauf hin, dass mit der schrittweisen Kommerzialisierung solcher Soft-Roboter das Verhältnis von menschlichem Druck und Obst- und Gemüseabfällen an der Front der landwirtschaftlichen Ernte deutlich verbessert werden dürfte, was eine neue Werkzeuggrundlage für die Entwicklung von Präzisionslandwirtschaft und intelligenten Landmaschinen bieten würde.