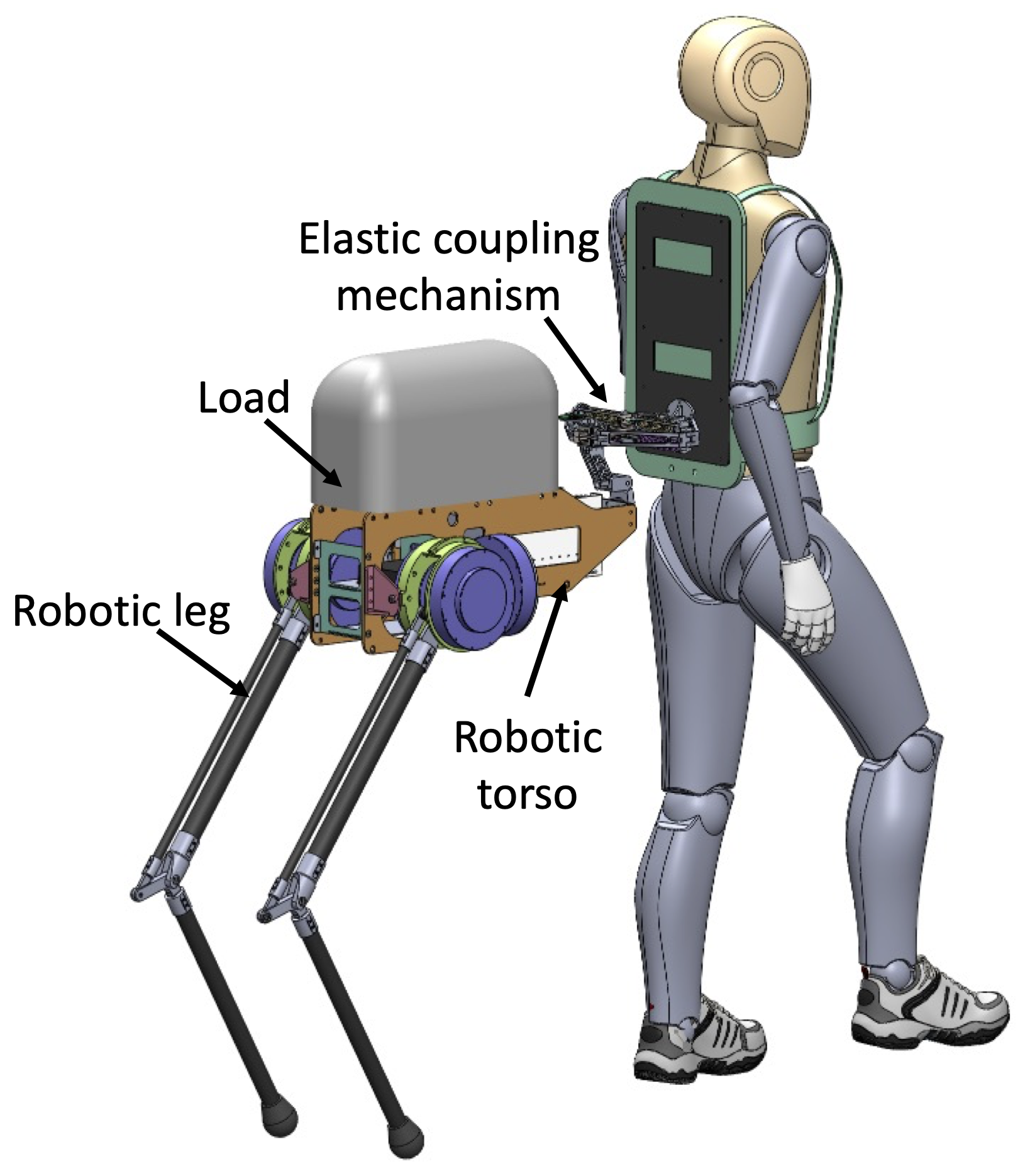
Das Team von Professor Fu Chenglong von der Southern University of Science and Technology entwickelte ursprünglich einen tragbaren Zentauren-Laufroboter mit Gewicht. Die entsprechenden Ergebnisse wurden in renommierten Fachzeitschriften auf dem Gebiet der Robotik veröffentlicht. Herkömmliche Exoskelett-Roboter haben eine geringe Assistenzeffizienz und können den menschlichen Stoffwechsel nur um etwa 10 % reduzieren.Der Zentauren-Roboter bricht mit dem traditionellen Design und lässt sich von der tragenden Form von Vierbeinern inspirieren. Als unabhängige Gliedmaßen werden sie über eine tragbare elastische Kopplungsschnittstelle mit dem menschlichen Rücken verbunden, um ein Mensch-Maschine-Hybrid-Vierbeinsystem zu bilden.
Der Roboter ist mit einem weichen elastischen Kopplungsmechanismus ausgestattet, der nichtlineare Steifigkeitseigenschaften aufweist und eine dynamische Entkopplung von Kraftunterstützung und Gleichgewicht realisiert; kombiniert mit dem kollaborativen Kontrollrahmen für Geh-Interaktion,Es kann die Bewegungsabsicht des menschlichen Körpers in Echtzeit erfassen, ihr ohne manuelle Anweisungen mit hoher Präzision in alle Richtungen folgen und gleichzeitig einen stabilen horizontalen Schub ausgeben.
Die experimentelle Überprüfung zeigt, dass der Roboter eine hervorragende Leistung aufweist. Was die Manövrierfähigkeit angeht, kann er auf engstem Raum von 1 Meter den 8er-Kreis um den Haufen herum absolvieren und problemlos komplexe Straßenoberflächen wie Stufen und Hänge passieren.
Was die Belastungsleistung anbelangt,Beim Tragen eines Gewichts von 20 kg werden die Netto-Stoffwechselkosten des menschlichen Körpers um 35 % reduziert und der Druck auf die Fußsohlen wird um 52 % reduziert.Es gibt keinen signifikanten Unterschied zwischen Stabilität und Gehen ohne Last.
Dieser Roboter eignet sich für Notfallrettung, Felderkundung, komplexe Geländelogistikunterstützung und andere Szenarien und soll in Zukunft die physiologischen Grenzen des menschlichen Körpers durchbrechen.