Ein Team der Rice University in den Vereinigten Staaten hat kürzlich ein neues Straßenradarsystem namens EyeDAR auf den Markt gebracht, das autonome Fahrzeuge mit erweiterten Sensorfunktionen ähnlich einem „dritten Auge“ ausstatten soll. Forscher sagten, dass diese Technologie die Genauigkeit der Umweltwahrnehmung und die Sicherheitsredundanz autonomer Fahrzeuge erheblich verbessern kann, indem wichtige Verkehrsinformationen über Millimeterwellenradargeräte, die in der Straßeninfrastruktur eingesetzt werden, an das fahrzeugmontierte System zurückübertragen werden.
Bestehendes autonomes Fahren basiert hauptsächlich auf der Zusammenarbeit von Bordkameras, Lidar (LiDAR) und herkömmlichem Radar: Die Kamera ist für die Identifizierung von Fußgängern, Fahrzeugen und Verkehrszeichen verantwortlich, und LiDAR nutzt Laserimpulse, um eine hochpräzise dreidimensionale Punktwolke aufzubauen, um die Defizite von Vision und Radar bei der räumlichen Tiefenwahrnehmung auszugleichen. Allerdings sind beide anfällig für Unwetter wie Regen, Schnee, Dunst usw. Radar erreicht eine Zielerkennung, die nicht auf Licht und Wetter angewiesen ist, indem es Funkwellen sendet und empfängt. In der tatsächlichen Straßenumgebung reflektieren die erkannten Objekte jedoch oft nur eine geringe Menge an Signalen und eine große Anzahl von Radarwellen wird verstreut, was zu unvollständigen Informationen führt, die vom Fahrzeugradar empfangen werden, was es schwierig macht, potenzielle Risiken wie blockierte oder teilweise blockierte Fußgänger und Fahrzeuge rechtzeitig genau zu identifizieren.
Da selbstfahrende Lastkraftwagen, Lieferroboter usw. sich allmählich der Kommerzialisierung nähern, wird die Einschränkung von Sensoren, bei komplexen Straßenverhältnissen „nicht klar oder weit sehen zu können“, zunehmend als Sicherheitsmangel angesehen. Das Team der Rice University versucht, das Wahrnehmungssystem von Fahrzeugen auf die Straßeninfrastruktur auszudehnen und nutzt EyeDAR, um tote Winkel und Informationslücken zu schließen. Dieses Gerät verfügt über ein Millimeterwellenradar mit geringem Stromverbrauch und kann an Straßenanlagen wie Ampeln, Verkehrsschildern und Werbetafeln installiert werden. Es „sammelt“ die ursprünglich in die Umgebung gestreuten reflektierten Wellen, wandelt sie in eine vollständigere Beschreibung der umliegenden Verkehrsteilnehmer um und sendet sie zurück an das Bordradarsystem des Fahrzeugs.
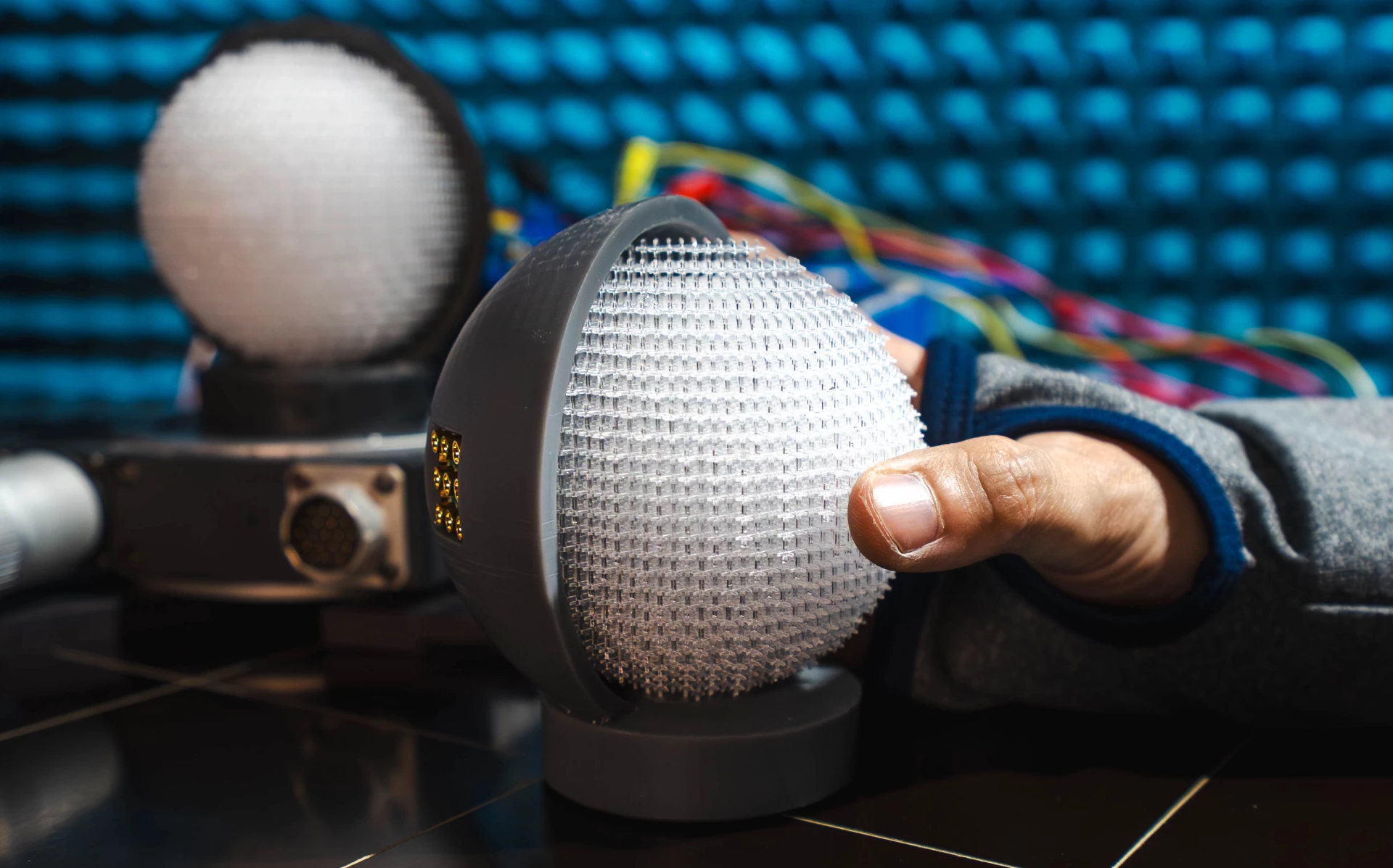
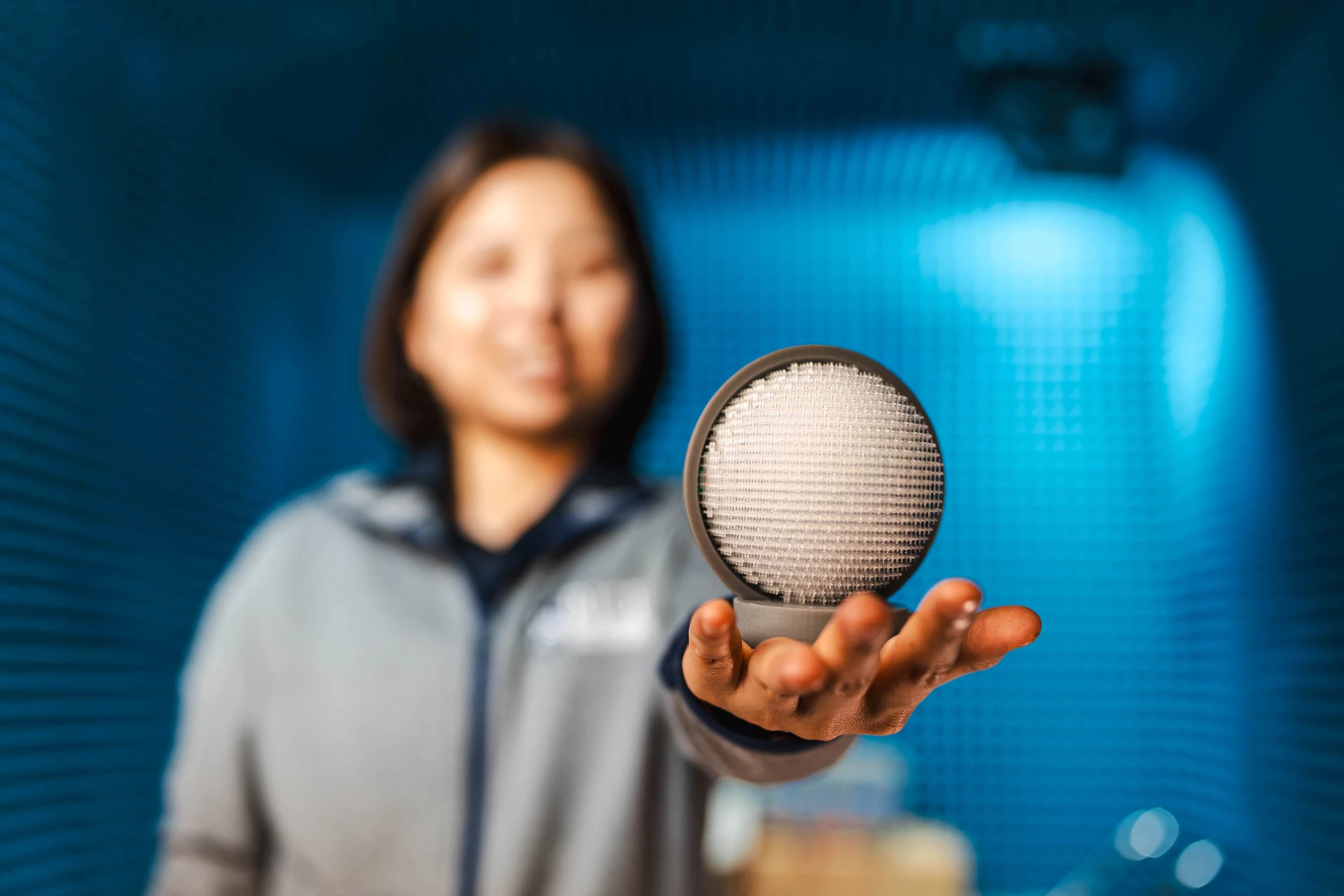
Der Kern von EyeDAR ist eine etwa orangefarbene Sensoreinheit, die aus zwei Teilen besteht, die einer „Linse“ und einer „Netzhaut“ ähneln: Das vordere Ende ist eine Lüneburg-Metamateriallinse, die mithilfe der 3D-Drucktechnologie hergestellt wird und dazu dient, Funksignale aus verschiedenen Richtungen genau auf einen festen Fokus zu fokussieren; Darauf folgt eine Reihe dicht angeordneter Antennenarrays, die für den Empfang und die Analyse der räumlichen Informationen dieser fokussierten Signale und deren anschließende Rückführung an das Automobilradarsystem verantwortlich sind. Im Gegensatz zu herkömmlichen Radarlösungen, die große Antennenarrays und komplexe digitale Berechnungen zur vollständigen Strahlformung und Signalverarbeitung erfordern, verlässt sich EyeDAR auf die physische Struktur der Linse selbst, um eine große Menge an „Vorverarbeitungs“-Arbeiten durchzuführen, was die Belastung elektronischer Hardware und Algorithmen erheblich vereinfacht.
Nach Angaben des Forschungsteams besteht diese Linse aus mehr als 8.000 winzigen Einheiten mit unterschiedlichen Formen und Brechungsindizes. Die Position und Parameter jeder Einheit sind sorgfältig entworfen, damit sich das gesamte Material beim Durchgang elektromagnetischer Wellen auf eine bestimmte Art und Weise biegen und fokussieren kann. Es handelt sich im Wesentlichen um einen „Hardware-Hardware“-Analogsignalprozessor. Durch diese Metamaterialstruktur kann EyeDAR die Vorberechnung räumlicher Informationen während des Übertragungsprozesses mit Lichtgeschwindigkeit „sofort“ abschließen, wodurch die Notwendigkeit einer großen zeit- und energieaufwändigen digitalen Verarbeitung bei herkömmlichen Radargeräten entfällt. Experimentelle Ergebnisse zeigen, dass das System Zielrichtungen mehr als 200-mal schneller auflösen kann als herkömmliches Radar, was als erheblicher Leistungssprung bei der analogen Verarbeitung im Vergleich zur digitalen Verarbeitung angesehen wird.

Im Gegensatz zu herkömmlichem Straßenradar oder aktiven Sendegeräten erzeugt EyeDAR selbst keine neuen elektromagnetischen Wellen. Stattdessen konzentriert es sich darauf, die „Rest“-Echos zu sammeln, die nach der Erkennung des Ziels durch das Fahrzeug nach außen gestreut werden, sie dann zu filtern und zu rekonstruieren und das „gereinigte“ Signal zurück zum am Fahrzeug montierten Radar zu reflektieren. Forscher glauben, dass dieser Entwurf, der kompakt und kostengünstig ist, über eine einfache Architektur verfügt und auf einer ultraschnellen Simulationsverarbeitung basiert, voraussichtlich die großflächige Verlegung entlang städtischer Straßen und Autobahnen unterstützen und so ein Infrastrukturnetzwerk bilden wird, das der „Fernsicht“ und „Perspektive“ autonomer Fahrzeuge dient.
Allerdings bleibt Fertigungsexperte Emeka Moronu vorsichtig, ob der Plan tatsächlich umgesetzt werden kann. Er wies darauf hin, dass die theoretischen Modelle und experimentellen Daten zwar spannend seien, es aber eine sehr anspruchsvolle technische Aufgabe sei, Tausende von Mikrostruktureinheiten über einen langen Zeitraum in der tatsächlichen Produktion stabil zu reproduzieren und sicherzustellen, dass sie unter extremen Außenbedingungen wie hohen Temperaturen und starker Kälte und Frost ihre geometrische Genauigkeit und Leistung beibehalten. Dies könnte auch zu einer der größten Hürden für EyeDAR werden, das Labor zu verlassen und sich dem groß angelegten Einsatz zuzuwenden.
Trotz der Ungewissheit über die Aussichten ist das Team der Rice University davon überzeugt, dass EyeDAR das Potenzial des straßenseitigen Metamaterialradars für die Sicherheit beim autonomen Fahren demonstriert. Sobald sie in großem Maßstab eingesetzt werden, können sich Fahrzeuge auf diese „Augen am Straßenrand“ verlassen, um Informationen über den Straßenzustand zu erhalten, die über den Erfassungsbereich ihrer eigenen Sensoren hinausgehen, und Verkehrsteilnehmer an Kurven sowie Fußgänger oder durch große Hindernisse verdeckte Fahrzeuge frühzeitig zu erkennen und so die Sicherheitsredundanz des gesamten Transportsystems zu verbessern. Forscher gehen außerdem davon aus, dass diese Technologie in Zukunft auch auf Anwendungsszenarien wie Drohnen, Roboter und Sicherheitsüberwachung ausgeweitet werden kann und eine zuverlässigere Unterstützung der Umweltwahrnehmung für eine Vielzahl autonomer Systeme bietet.